SoC FPGA Copter
Gurtner, Lindner, Schneeberger, Tockner, Wandl, Windhager
Überblick
- Projektteam
- Motivation
- iNav
- Systemübersicht
- Kommunikation
- IP-Cores
- Herausforderungen
- Ausblick
Projektteam



Motivation
- Herkömmliche Drohnen besitzen wenig Rechenleistung
- FPGA ist ideal für zukünftige Video- oder Signalverarbeitung
- Plattform für weitere drohnenbasierte Projekte
- Artificial Intelligence
- Computer Vision
- Software für Fixed-Wing & Multirotor
- Fork von Cleanflight
- Open Source
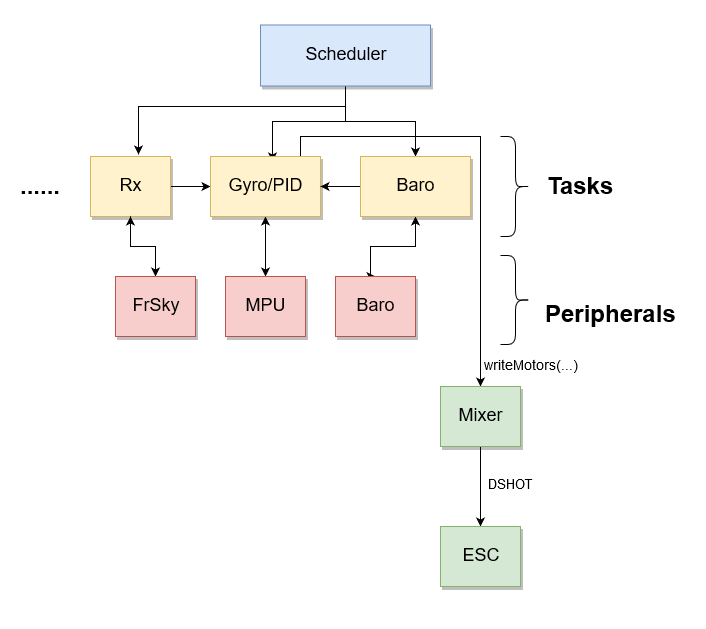
Systemübersicht
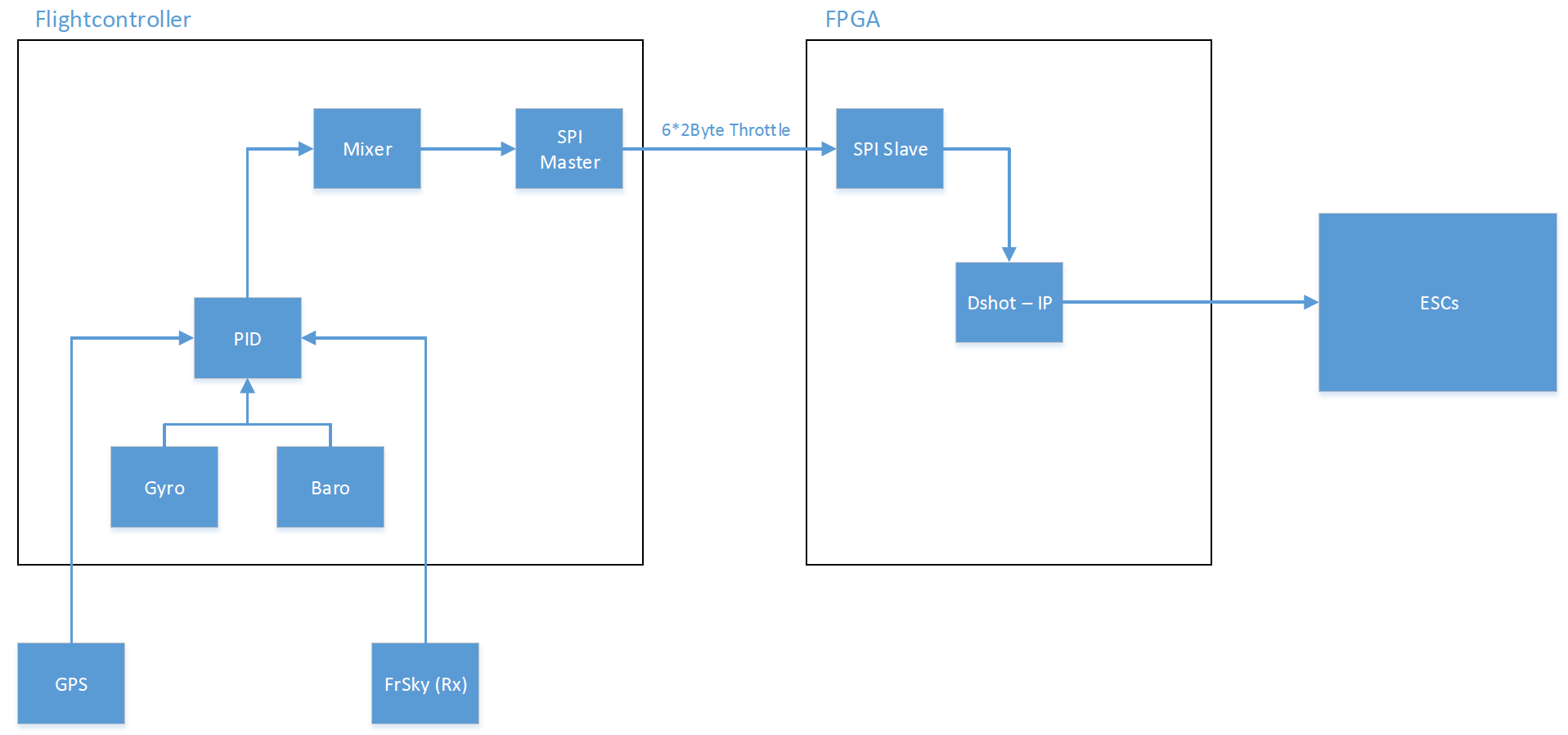
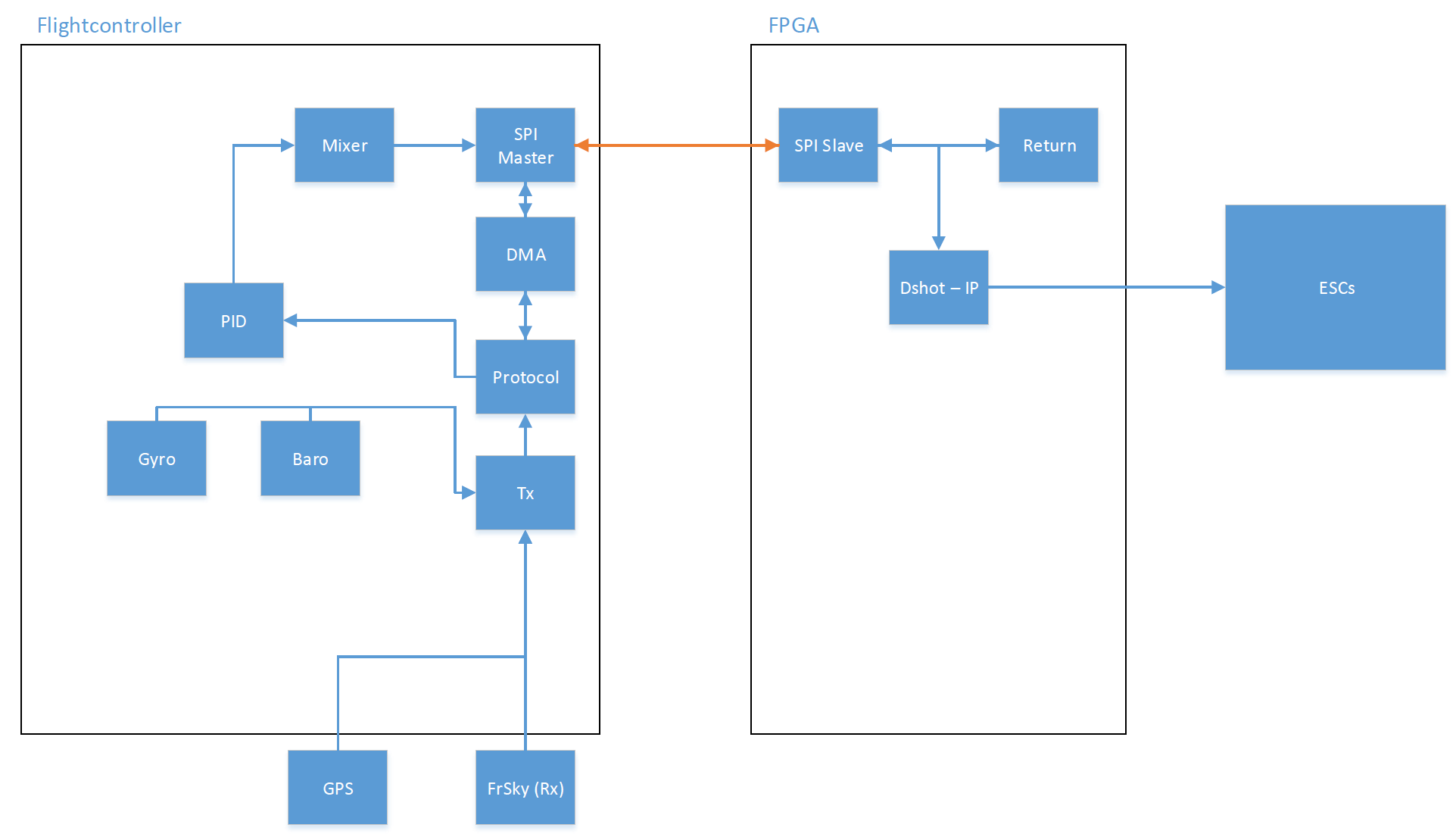
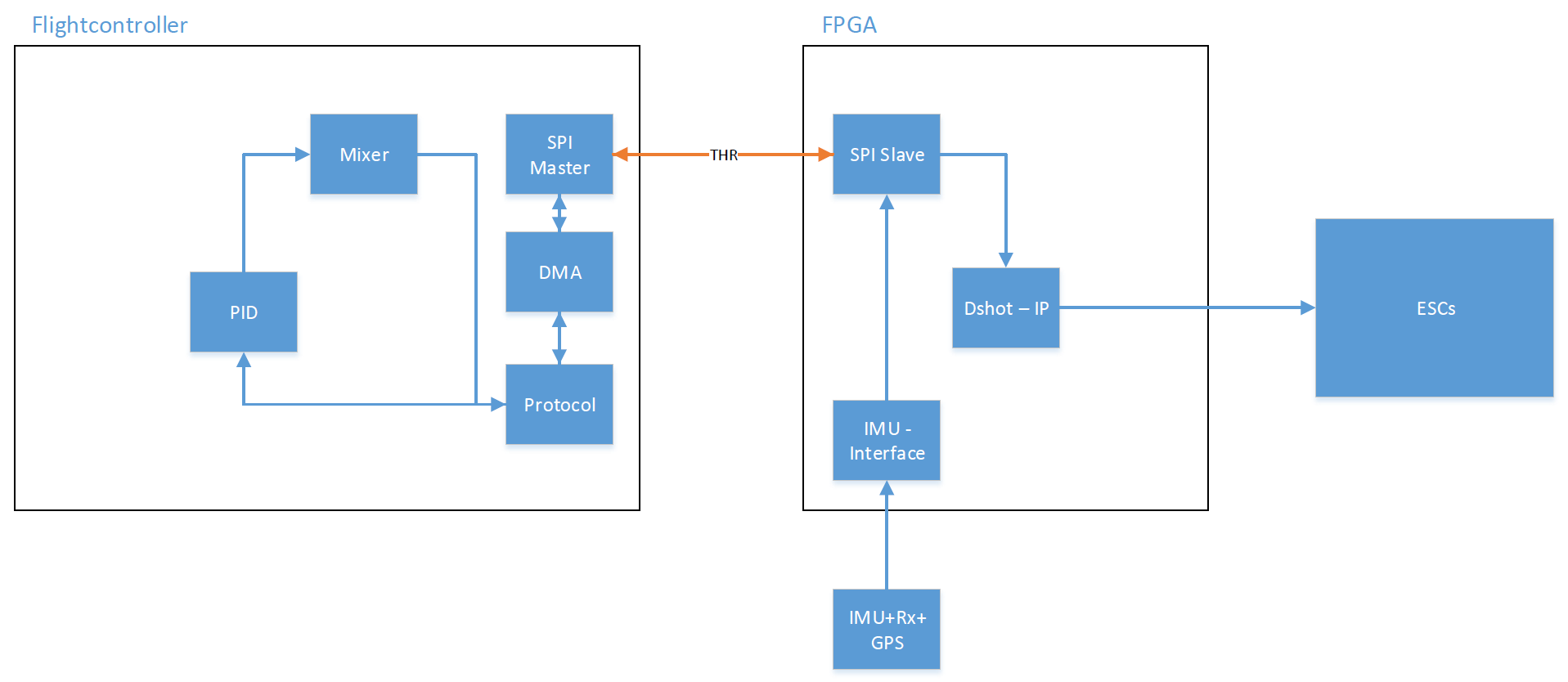
Kommunikation
- SPI
- Selbst definiertes Protokoll
IP Cores
- SPI Communications Handler
- DShot
- Sbus
Herausforderungen
- Kommunikation µC ↔ FPGA
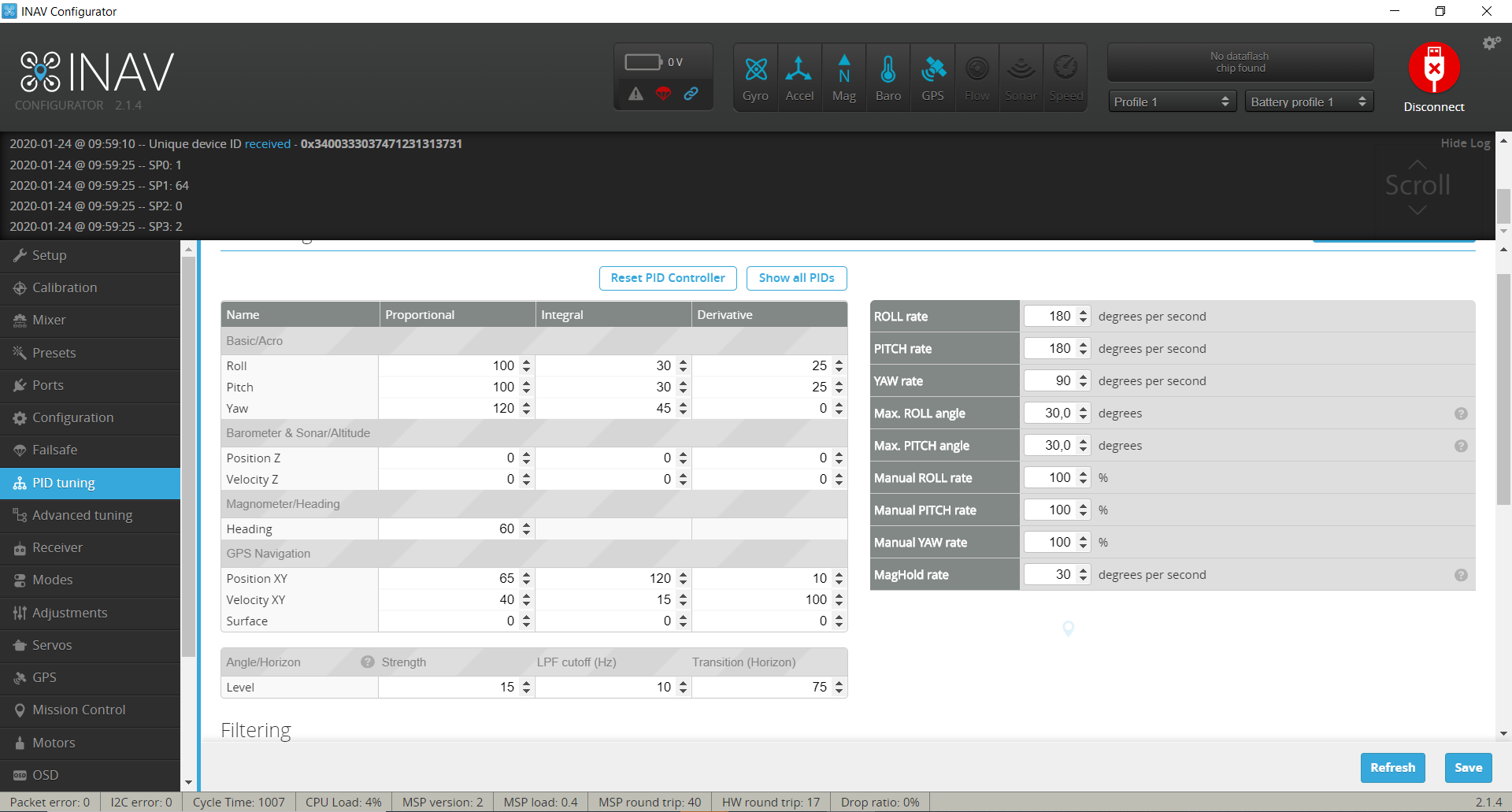
- PID Tuning
- Fliegen und Steuern der Drohne
- Qualität der IP-Core Dokumentationen
- Debugging des Systems
Ausblick
- Netzwerk Gesundheitstourismus Wald
- Sämtliche Regelung im FPGA
- Flugfähigkeit ohne Flightcontroller